Usage scenarios#
These scenarios show complete %%there ai workflows: generated cells, remote
state retrieval, file download and a --fix iteration.
%load_ext pythonhere
%connect-there
App Usage Chart#
%%there ai
Show a chart of foreground app usage statistics in last 24 hours.
Save the results in a `usage` variable and in a `usage.csv` file.
Print instructions for drawing a usage pie chart locally with pandas and matplotlib.
UI should be optimised for the Android Portrait mode.
Show code cell source
%%there
# Generated locally by %%there ai. Review before running.
from pathlib import Path
from csv import DictWriter
from jnius import autoclass
from kivy.lang import Builder
from kivy.logger import Logger
from kivy.metrics import dp, sp
from kivy.uix.boxlayout import BoxLayout
from kivy.uix.label import Label
from kivy.uix.progressbar import ProgressBar
from kivy.uix.popup import Popup
usage = []
usage_status = {
"ok": False,
"stage": "starting",
"message": "Starting usage statistics view.",
"error": None,
}
usage_label_cache = globals().get("usage_label_cache", {})
usage_label_errors = []
usage_csv_path = "usage.csv"
def _show_usage_error_popup(message):
content = Label(
text=str(message),
font_size=sp(15),
halign="left",
valign="top",
text_size=(dp(300), None),
)
popup = Popup(
title="Usage statistics error",
content=content,
size_hint=(0.9, None),
height=dp(240),
)
popup.open()
def _format_duration(seconds):
seconds = int(max(0, seconds))
hours = seconds // 3600
minutes = (seconds % 3600) // 60
secs = seconds % 60
if hours:
return f"{hours}h {minutes}m"
if minutes:
return f"{minutes}m {secs}s"
return f"{secs}s"
def _get_android_context_and_activity():
PythonActivity = autoclass("org.kivy.android.PythonActivity")
activity = PythonActivity.mActivity
if activity is not None:
return activity, activity
try:
PythonService = autoclass("org.kivy.android.PythonService")
service = PythonService.mService
if service is not None:
return service, None
except Exception as exc:
Logger.info(f"PythonHere: PythonService fallback unavailable: {type(exc).__name__}: {exc}")
return None, None
def _check_usage_access(context):
VERSION = autoclass("android.os.Build$VERSION")
AppOpsManager = autoclass("android.app.AppOpsManager")
Context = autoclass("android.content.Context")
sdk_int = int(VERSION.SDK_INT)
package_name = str(context.getPackageName())
uid = int(context.getApplicationInfo().uid)
app_ops_service = Context.APP_OPS_SERVICE or "appops"
app_ops = context.getSystemService(app_ops_service)
if app_ops is None:
return {
"granted": False,
"sdk_int": sdk_int,
"package_name": package_name,
"mode": None,
"mode_name": "app_ops_unavailable",
"error": "AppOps service is unavailable.",
}
op_name = AppOpsManager.OPSTR_GET_USAGE_STATS or "android:get_usage_stats"
mode = int(app_ops.checkOpNoThrow(op_name, uid, package_name))
mode_names = {
int(AppOpsManager.MODE_ALLOWED): "allowed",
int(AppOpsManager.MODE_IGNORED): "ignored",
int(AppOpsManager.MODE_DEFAULT): "default",
int(AppOpsManager.MODE_ERRORED): "errored",
}
mode_foreground = getattr(AppOpsManager, "MODE_FOREGROUND", None)
if mode_foreground is not None:
mode_names[int(mode_foreground)] = "foreground"
return {
"granted": mode == int(AppOpsManager.MODE_ALLOWED),
"sdk_int": sdk_int,
"package_name": package_name,
"mode": mode,
"mode_name": mode_names.get(mode, str(mode)),
"error": None,
}
def _resolve_app_label(package_manager, package_name, sdk_int, application_info_flags_class):
if package_name in usage_label_cache:
return usage_label_cache[package_name]
try:
if sdk_int >= 33 and application_info_flags_class is not None:
app_info = package_manager.getApplicationInfo(
package_name,
application_info_flags_class.of(0),
)
else:
app_info = package_manager.getApplicationInfo(package_name, 0)
label = package_manager.getApplicationLabel(app_info)
label_text = str(label) if label is not None else package_name
except Exception as exc:
label_text = package_name
error_text = f"{package_name}: {type(exc).__name__}: {exc}"
usage_label_errors.append(error_text)
Logger.info(f"PythonHere: Could not resolve app label: {error_text}")
usage_label_cache[package_name] = label_text
return label_text
def _write_usage_csv(rows):
output_path = Path(usage_csv_path)
fieldnames = [
"rank",
"app_label",
"package",
"foreground_seconds",
"foreground_minutes",
"foreground_hours",
"percent",
"foreground_ms",
"first_time_stamp_ms",
"last_time_stamp_ms",
"last_time_used_ms",
]
with output_path.open("w", newline="", encoding="utf-8") as csv_file:
writer = DictWriter(csv_file, fieldnames=fieldnames)
writer.writeheader()
for row in rows:
writer.writerow({name: row.get(name, "") for name in fieldnames})
return output_path.name
def _load_usage_stats():
context, activity = _get_android_context_and_activity()
if context is None:
output_name = _write_usage_csv([])
return [], {
"ok": False,
"stage": "android_context",
"message": "Android context is unavailable. Usage statistics cannot be queried.",
"error": "Android context is unavailable.",
"output_path": output_name,
}
access = _check_usage_access(context)
end_ms = int(__import__("time").time() * 1000)
begin_ms = end_ms - (24 * 60 * 60 * 1000)
if not access["granted"]:
output_name = _write_usage_csv([])
return [], {
"ok": False,
"stage": "usage_access",
"message": (
"Usage access is not enabled for this app. Tap Open Settings, "
"enable usage access for this app if it is listed, return here, "
"then tap Refresh. If the app is not listed, the manifest must "
"declare android.permission.PACKAGE_USAGE_STATS."
),
"error": None,
"access_granted": False,
"app_ops_mode": access["mode"],
"app_ops_mode_name": access["mode_name"],
"sdk_int": access["sdk_int"],
"package_name": access["package_name"],
"window_start_ms": begin_ms,
"window_end_ms": end_ms,
"rows": 0,
"output_path": output_name,
}
VERSION = autoclass("android.os.Build$VERSION")
Context = autoclass("android.content.Context")
UsageStatsManager = autoclass("android.app.usage.UsageStatsManager")
sdk_int = int(VERSION.SDK_INT)
usage_service = Context.USAGE_STATS_SERVICE or "usagestats"
usage_manager = context.getSystemService(usage_service)
if usage_manager is None:
output_name = _write_usage_csv([])
return [], {
"ok": False,
"stage": "usage_manager",
"message": "UsageStatsManager is unavailable on this device.",
"error": "UsageStatsManager is unavailable.",
"access_granted": True,
"sdk_int": sdk_int,
"window_start_ms": begin_ms,
"window_end_ms": end_ms,
"rows": 0,
"output_path": output_name,
}
package_manager = context.getPackageManager()
application_info_flags_class = None
if sdk_int >= 33:
application_info_flags_class = autoclass("android.content.pm.PackageManager$ApplicationInfoFlags")
interval_daily = int(UsageStatsManager.INTERVAL_DAILY)
stats_list = usage_manager.queryUsageStats(interval_daily, begin_ms, end_ms)
aggregate = {}
queried_count = 0
if stats_list is not None:
queried_count = int(stats_list.size())
for index in range(queried_count):
stat = stats_list.get(index)
package_name = stat.getPackageName()
if package_name is None:
continue
package_name = str(package_name)
foreground_ms = int(stat.getTotalTimeInForeground())
if foreground_ms <= 0:
continue
record = aggregate.setdefault(
package_name,
{
"package": package_name,
"foreground_ms": 0,
"first_time_stamp_ms": None,
"last_time_stamp_ms": None,
"last_time_used_ms": None,
},
)
record["foreground_ms"] += foreground_ms
first_ts = int(stat.getFirstTimeStamp())
last_ts = int(stat.getLastTimeStamp())
last_used = int(stat.getLastTimeUsed())
if record["first_time_stamp_ms"] is None or first_ts < record["first_time_stamp_ms"]:
record["first_time_stamp_ms"] = first_ts
if record["last_time_stamp_ms"] is None or last_ts > record["last_time_stamp_ms"]:
record["last_time_stamp_ms"] = last_ts
if record["last_time_used_ms"] is None or last_used > record["last_time_used_ms"]:
record["last_time_used_ms"] = last_used
total_ms = sum(item["foreground_ms"] for item in aggregate.values())
rows = []
for package_name, item in aggregate.items():
app_label = _resolve_app_label(
package_manager,
package_name,
sdk_int,
application_info_flags_class,
)
seconds = item["foreground_ms"] / 1000.0
rows.append(
{
"app_label": app_label,
"package": package_name,
"foreground_seconds": round(seconds, 3),
"foreground_minutes": round(seconds / 60.0, 3),
"foreground_hours": round(seconds / 3600.0, 4),
"percent": round((item["foreground_ms"] / total_ms * 100.0), 3) if total_ms else 0.0,
"foreground_ms": int(item["foreground_ms"]),
"first_time_stamp_ms": item["first_time_stamp_ms"],
"last_time_stamp_ms": item["last_time_stamp_ms"],
"last_time_used_ms": item["last_time_used_ms"],
}
)
rows.sort(key=lambda item: item["foreground_ms"], reverse=True)
for rank, row in enumerate(rows, start=1):
row["rank"] = rank
row["duration"] = _format_duration(row["foreground_seconds"])
output_name = _write_usage_csv(rows)
message = f"Loaded {len(rows)} apps with foreground usage in the last 24 hours. Saved {output_name}."
if not rows:
message = (
"Usage access is enabled, but Android returned no foreground usage rows "
"for the last 24 hours. The device may have no accessible records."
)
return rows, {
"ok": True,
"stage": "complete",
"message": message,
"error": None,
"access_granted": True,
"app_ops_mode": access["mode"],
"app_ops_mode_name": access["mode_name"],
"sdk_int": sdk_int,
"package_name": access["package_name"],
"window_start_ms": begin_ms,
"window_end_ms": end_ms,
"query_rows": queried_count,
"rows": len(rows),
"total_foreground_seconds": round(total_ms / 1000.0, 3),
"output_path": output_name,
"package_visibility_note": (
"On Android 11 and newer, package label lookups can be affected by package visibility. "
"UsageStats rows reflect accessible usage records."
if sdk_int >= 30
else ""
),
"label_errors": list(usage_label_errors),
}
def _make_chart_row(row, max_seconds):
container = BoxLayout(
orientation="vertical",
size_hint_y=None,
height=dp(82),
padding=(0, dp(4), 0, dp(4)),
spacing=dp(3),
)
header = BoxLayout(
orientation="horizontal",
size_hint_y=None,
height=dp(28),
spacing=dp(8),
)
name_label = Label(
text=f"{row['rank']}. {row['app_label']}",
font_size=sp(15),
halign="left",
valign="middle",
shorten=True,
shorten_from="right",
text_size=(dp(210), dp(28)),
size_hint_x=0.72,
)
time_label = Label(
text=row.get("duration", _format_duration(row.get("foreground_seconds", 0))),
font_size=sp(14),
halign="right",
valign="middle",
text_size=(dp(90), dp(28)),
size_hint_x=0.28,
)
header.add_widget(name_label)
header.add_widget(time_label)
progress = ProgressBar(
max=100,
value=(row["foreground_seconds"] / max_seconds * 100.0) if max_seconds else 0,
size_hint_y=None,
height=dp(18),
)
detail = Label(
text=f"{row['percent']:.1f}% {row['package']}",
font_size=sp(12),
halign="left",
valign="middle",
shorten=True,
shorten_from="right",
text_size=(dp(320), dp(20)),
size_hint_y=None,
height=dp(20),
)
container.add_widget(header)
container.add_widget(progress)
container.add_widget(detail)
return container
def _update_usage_ui():
ui = globals().get("usage_ui")
if ui is None:
return
state = globals().get("usage_status", {})
rows = globals().get("usage", [])
message = state.get("message", "")
if state.get("package_visibility_note"):
message += "\n" + state["package_visibility_note"]
ui.ids.status_label.text = message
ui.ids.chart_box.clear_widgets()
if rows:
top_rows = rows[:20]
max_seconds = max(row["foreground_seconds"] for row in top_rows) or 1
for row in top_rows:
ui.ids.chart_box.add_widget(_make_chart_row(row, max_seconds))
else:
empty_label = Label(
text="No usage rows to chart yet.",
font_size=sp(17),
halign="center",
valign="middle",
text_size=(dp(320), None),
size_hint_y=None,
height=dp(140),
)
ui.ids.chart_box.add_widget(empty_label)
ui.ids.summary_label.text = (
f"Rows: {state.get('rows', len(rows))} File: {state.get('output_path', usage_csv_path)}"
)
def refresh_usage_stats(*args):
global usage, usage_status
try:
usage_status = {
"ok": False,
"stage": "loading",
"message": "Loading foreground usage statistics.",
"error": None,
}
_update_usage_ui()
rows, state = _load_usage_stats()
usage = rows
usage_status = state
globals()["usage"] = usage
globals()["usage_status"] = usage_status
globals()["usage_label_cache"] = usage_label_cache
globals()["usage_label_errors"] = usage_label_errors
_update_usage_ui()
except Exception as exc:
Logger.exception("PythonHere: Could not load usage statistics")
usage = []
usage_status = {
"ok": False,
"stage": "exception",
"message": f"Could not load usage statistics: {type(exc).__name__}: {exc}",
"error": f"{type(exc).__name__}: {exc}",
"output_path": usage_csv_path,
}
globals()["usage"] = usage
globals()["usage_status"] = usage_status
try:
_write_usage_csv([])
except Exception as csv_exc:
Logger.exception("PythonHere: Could not write empty usage CSV after error")
usage_status["csv_error"] = f"{type(csv_exc).__name__}: {csv_exc}"
_update_usage_ui()
_show_usage_error_popup(usage_status["message"])
def open_usage_access_settings(*args):
global usage_status
try:
context, activity = _get_android_context_and_activity()
if activity is None:
usage_status = {
**globals().get("usage_status", {}),
"stage": "settings",
"settings_opened": False,
"message": "A foreground Android activity is required to open Usage Access Settings.",
"error": "Foreground activity unavailable.",
}
globals()["usage_status"] = usage_status
_update_usage_ui()
return
Intent = autoclass("android.content.Intent")
Settings = autoclass("android.provider.Settings")
action = Settings.ACTION_USAGE_ACCESS_SETTINGS or "android.settings.USAGE_ACCESS_SETTINGS"
intent = Intent(action)
activity.startActivity(intent)
usage_status = {
**globals().get("usage_status", {}),
"stage": "settings",
"settings_opened": True,
"settings_action": action,
"message": (
"Usage Access Settings opened. Enable usage access for this app if it is listed, "
"return here, then tap Refresh."
),
"error": None,
}
globals()["usage_status"] = usage_status
_update_usage_ui()
except Exception as exc:
Logger.exception("PythonHere: Could not open Usage Access Settings")
usage_status = {
**globals().get("usage_status", {}),
"stage": "settings_exception",
"settings_opened": False,
"message": f"Could not open Usage Access Settings: {type(exc).__name__}: {exc}",
"error": f"{type(exc).__name__}: {exc}",
}
globals()["usage_status"] = usage_status
_update_usage_ui()
_show_usage_error_popup(usage_status["message"])
KV = """
#:import dp kivy.metrics.dp
#:import sp kivy.metrics.sp
BoxLayout:
orientation: "vertical"
padding: dp(12)
spacing: dp(8)
Label:
id: title_label
text: "Foreground app usage"
size_hint_y: None
height: dp(44)
font_size: sp(22)
bold: True
halign: "center"
valign: "middle"
text_size: self.size
Label:
id: status_label
text: "Preparing usage statistics."
size_hint_y: None
height: dp(112)
font_size: sp(14)
halign: "left"
valign: "top"
text_size: self.width, None
BoxLayout:
orientation: "horizontal"
size_hint_y: None
height: dp(52)
spacing: dp(8)
Button:
id: refresh_button
text: "Refresh"
font_size: sp(16)
Button:
id: settings_button
text: "Open Settings"
font_size: sp(16)
Label:
id: summary_label
text: "Rows: 0 File: usage.csv"
size_hint_y: None
height: dp(28)
font_size: sp(13)
halign: "left"
valign: "middle"
text_size: self.size
ScrollView:
do_scroll_x: False
do_scroll_y: True
GridLayout:
id: chart_box
cols: 1
spacing: dp(8)
padding: 0, dp(4)
size_hint_y: None
height: self.minimum_height
"""
try:
usage_ui = Builder.load_string(KV)
if usage_ui is None:
raise RuntimeError("Builder.load_string returned None for usage UI.")
usage_ui.ids.refresh_button.bind(on_release=refresh_usage_stats)
usage_ui.ids.settings_button.bind(on_release=open_usage_access_settings)
root.clear_widgets()
root.add_widget(usage_ui)
globals()["usage_ui"] = usage_ui
globals()["refresh_usage_stats"] = refresh_usage_stats
globals()["open_usage_access_settings"] = open_usage_access_settings
refresh_usage_stats()
except Exception as exc:
Logger.exception("PythonHere: Could not build usage statistics UI")
usage_status = {
"ok": False,
"stage": "ui_exception",
"message": f"Could not build usage statistics UI: {type(exc).__name__}: {exc}",
"error": f"{type(exc).__name__}: {exc}",
"output_path": usage_csv_path,
}
globals()["usage_status"] = usage_status
_show_usage_error_popup(usage_status["message"])
print(f"%there download {Path(usage_csv_path).name}")
print(
"""
Local pie chart instructions with pandas and matplotlib:
1. Download usage.csv from this PythonHere session.
2. Put usage.csv in your local working directory.
3. Run this code locally:
import pandas as pd
import matplotlib.pyplot as plt
df = pd.read_csv("usage.csv")
df = df[df["foreground_seconds"] > 0].copy()
if df.empty:
print("No usage rows found in usage.csv")
else:
top = df.sort_values("foreground_seconds", ascending=False).head(10)
other_seconds = df.loc[~df.index.isin(top.index), "foreground_seconds"].sum()
if other_seconds > 0:
top = pd.concat([
top[["app_label", "foreground_seconds"]],
pd.DataFrame([{"app_label": "Other", "foreground_seconds": other_seconds}]),
], ignore_index=True)
ax = top.set_index("app_label")["foreground_seconds"].plot.pie(
autopct="%1.1f%%",
startangle=90,
counterclock=False,
figsize=(7, 7),
)
ax.set_ylabel("")
ax.set_title("Foreground app usage, last 24 hours")
plt.tight_layout()
plt.show()
"""
)
%there download usage.csv
Local pie chart instructions with pandas and matplotlib:
1. Download usage.csv from this PythonHere session.
2. Put usage.csv in your local working directory.
3. Run this code locally:
import pandas as pd
import matplotlib.pyplot as plt
df = pd.read_csv("usage.csv")
df = df[df["foreground_seconds"] > 0].copy()
if df.empty:
print("No usage rows found in usage.csv")
else:
top = df.sort_values("foreground_seconds", ascending=False).head(10)
other_seconds = df.loc[~df.index.isin(top.index), "foreground_seconds"].sum()
if other_seconds > 0:
top = pd.concat([
top[["app_label", "foreground_seconds"]],
pd.DataFrame([{"app_label": "Other", "foreground_seconds": other_seconds}]),
], ignore_index=True)
ax = top.set_index("app_label")["foreground_seconds"].plot.pie(
autopct="%1.1f%%",
startangle=90,
counterclock=False,
figsize=(7, 7),
)
ax.set_ylabel("")
ax.set_title("Foreground app usage, last 24 hours")
plt.tight_layout()
plt.show()
Check the remote usage query status and preview the first row before downloading the CSV:
%there get {"status": usage_status, "first_row": usage[:1]}
{'status': {'ok': True,
'stage': 'complete',
'message': 'Loaded 25 apps with foreground usage in the last 24 hours. Saved usage.csv.',
'error': None,
'access_granted': True,
'app_ops_mode': 0,
'app_ops_mode_name': 'allowed',
'sdk_int': 34,
'package_name': 'me.herethere.pythonhere_dev',
'window_start_ms': 1780858194115,
'window_end_ms': 1780944594115,
'query_rows': 659,
'rows': 25,
'total_foreground_seconds': 36424.255,
'output_path': 'usage.csv',
'package_visibility_note': 'On Android 11 and newer, package label lookups can be affected by package visibility. UsageStats rows reflect accessible usage records.',
'label_errors': []},
'first_row': [{'app_label': 'PythonHereDev',
'package': 'me.herethere.pythonhere_dev',
'foreground_seconds': 19520.28,
'foreground_minutes': 325.338,
'foreground_hours': 5.4223,
'percent': 53.591,
'foreground_ms': 19520280,
'first_time_stamp_ms': 1780825004193,
'last_time_stamp_ms': 1780944487605,
'last_time_used_ms': 1780944488943,
'rank': 1,
'duration': '5h 25m'}]}
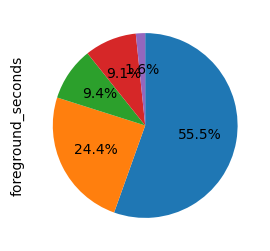
%there download usage.csv
After the remote cell writes usage.csv, download it and analyze it locally in
the notebook.
import pandas as pd
import matplotlib.pyplot as plt
df = pd.read_csv("usage.csv")
df = df[df["foreground_seconds"] > 0].copy()
top = df.sort_values("foreground_seconds", ascending=False).head(5)
ax = top.set_index("app_label")["foreground_seconds"].plot.pie(
labels=None,
autopct="%1.1f%%",
startangle=90,
counterclock=False,
figsize=(3, 3),
)
plt.show()
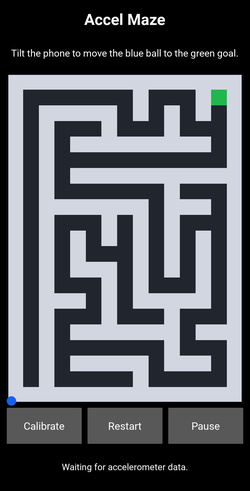
Accelerometer Maze#
%%there ai
A maze game controlled by accelerometer.
- portrait mode
- screen should be blocked from rotation
Show code cell source
%%there
# Generated locally by %%there ai. Review before running.
from math import floor
from random import shuffle
from kivy.clock import Clock
from kivy.factory import Factory
from kivy.graphics import Color, Ellipse, Line, Rectangle
from kivy.lang import Builder
from kivy.logger import Logger
from kivy.metrics import dp
from kivy.uix.label import Label
from kivy.uix.popup import Popup
from kivy.uix.widget import Widget
from plyer import accelerometer
def _maze_show_error(title, message):
globals()["maze_game_last_error"] = str(message)
try:
Popup(
title=title,
content=Label(
text=str(message)[:900],
text_size=(dp(280), None),
halign="center",
valign="middle",
),
size_hint=(0.88, 0.45),
).open()
except Exception:
Logger.exception("PythonHere: Could not show maze error popup")
def _make_accel_maze(cols=15, rows=21):
if cols % 2 == 0:
cols += 1
if rows % 2 == 0:
rows += 1
maze = [[1 for _ in range(cols)] for _ in range(rows)]
start = (1, rows - 2)
goal = (cols - 2, 1)
stack = [start]
maze[start[1]][start[0]] = 0
while stack:
c, r = stack[-1]
choices = []
for dc, dr in ((2, 0), (-2, 0), (0, 2), (0, -2)):
nc, nr = c + dc, r + dr
if 1 <= nc < cols - 1 and 1 <= nr < rows - 1 and maze[nr][nc] == 1:
choices.append((nc, nr, dc, dr))
if choices:
shuffle(choices)
nc, nr, dc, dr = choices[0]
maze[r + dr // 2][c + dc // 2] = 0
maze[nr][nc] = 0
stack.append((nc, nr))
else:
stack.pop()
maze[start[1]][start[0]] = 0
maze[goal[1]][goal[0]] = 0
return maze, start, goal
class AccelMazeBoard(Widget):
def __init__(self, **kwargs):
super().__init__(**kwargs)
self.maze = []
self.cols = 0
self.rows = 0
self.start_cell = None
self.goal_cell = None
self.cell = 0
self.board_x = 0
self.board_y = 0
self.ball_x = None
self.ball_y = None
self.ball_radius = 8
self.velocity_x = 0
self.velocity_y = 0
self.won = False
self.bind(pos=self._on_layout_change, size=self._on_layout_change)
def configure(self, maze, start_cell, goal_cell):
self.maze = maze
self.rows = len(maze)
self.cols = len(maze[0]) if self.rows else 0
self.start_cell = start_cell
self.goal_cell = goal_cell
self.won = False
self.velocity_x = 0
self.velocity_y = 0
self.ball_x = None
self.ball_y = None
self._update_metrics()
self._ensure_ball_position()
self._redraw()
def reset_ball(self):
self.velocity_x = 0
self.velocity_y = 0
self.won = False
self.ball_x = None
self.ball_y = None
self._ensure_ball_position()
self._redraw()
def _on_layout_change(self, *args):
old_cell = self.cell
old_rel_x = None
old_rel_y = None
if self.ball_x is not None and old_cell:
old_rel_x = (self.ball_x - self.board_x) / old_cell
old_rel_y = (self.ball_y - self.board_y) / old_cell
self._update_metrics()
if old_rel_x is not None and self.cell:
self.ball_x = self.board_x + old_rel_x * self.cell
self.ball_y = self.board_y + old_rel_y * self.cell
self.ball_radius = max(6, self.cell * 0.30)
else:
self._ensure_ball_position()
self._redraw()
def _update_metrics(self):
if not self.cols or not self.rows or self.width <= 0 or self.height <= 0:
self.cell = 0
return
self.cell = min(self.width / self.cols, self.height / self.rows)
self.board_x = self.x + (self.width - self.cell * self.cols) / 2
self.board_y = self.y + (self.height - self.cell * self.rows) / 2
self.ball_radius = max(6, self.cell * 0.30)
def _cell_center(self, cell):
c, r = cell
return (
self.board_x + (c + 0.5) * self.cell,
self.board_y + (self.rows - r - 0.5) * self.cell,
)
def _cell_at_point(self, x, y):
if not self.cell:
return None
c = int(floor((x - self.board_x) / self.cell))
bottom_row = int(floor((y - self.board_y) / self.cell))
r = self.rows - 1 - bottom_row
if 0 <= c < self.cols and 0 <= r < self.rows:
return c, r
return None
def _ensure_ball_position(self):
if self.ball_x is None and self.start_cell and self.cell:
self.ball_x, self.ball_y = self._cell_center(self.start_cell)
self.ball_radius = max(6, self.cell * 0.30)
def _circle_hits_wall(self, x, y):
if not self.cell or not self.maze:
return True
radius = self.ball_radius
c0 = int(floor((x - radius - self.board_x) / self.cell))
c1 = int(floor((x + radius - self.board_x) / self.cell))
b0 = int(floor((y - radius - self.board_y) / self.cell))
b1 = int(floor((y + radius - self.board_y) / self.cell))
for c in range(c0, c1 + 1):
for bottom_row in range(b0, b1 + 1):
r = self.rows - 1 - bottom_row
if c < 0 or c >= self.cols or r < 0 or r >= self.rows:
return True
if self.maze[r][c] == 1:
left = self.board_x + c * self.cell
bottom = self.board_y + bottom_row * self.cell
right = left + self.cell
top = bottom + self.cell
closest_x = min(max(x, left), right)
closest_y = min(max(y, bottom), top)
dx = x - closest_x
dy = y - closest_y
if dx * dx + dy * dy < radius * radius:
return True
return False
def step(self, dt, accel_x, accel_y):
if self.won:
return
self._update_metrics()
self._ensure_ball_position()
if self.ball_x is None or not self.cell:
return
dt = min(max(dt, 0.0), 0.05)
dead_zone = 0.04
if abs(accel_x) < dead_zone:
accel_x = 0
if abs(accel_y) < dead_zone:
accel_y = 0
force = self.cell * 36.0
self.velocity_x += accel_x * force * dt
self.velocity_y += accel_y * force * dt
friction = max(0.0, 1.0 - 2.1 * dt)
self.velocity_x *= friction
self.velocity_y *= friction
max_speed = self.cell * 7.5
speed_sq = self.velocity_x * self.velocity_x + self.velocity_y * self.velocity_y
if speed_sq > max_speed * max_speed:
scale = max_speed / (speed_sq ** 0.5)
self.velocity_x *= scale
self.velocity_y *= scale
next_x = self.ball_x + self.velocity_x * dt
if not self._circle_hits_wall(next_x, self.ball_y):
self.ball_x = next_x
else:
self.velocity_x *= -0.25
next_y = self.ball_y + self.velocity_y * dt
if not self._circle_hits_wall(self.ball_x, next_y):
self.ball_y = next_y
else:
self.velocity_y *= -0.25
current_cell = self._cell_at_point(self.ball_x, self.ball_y)
if current_cell == self.goal_cell:
self.won = True
self.velocity_x = 0
self.velocity_y = 0
self._redraw()
def _redraw(self, *args):
self.canvas.clear()
with self.canvas:
Color(0.06, 0.07, 0.09, 1)
Rectangle(pos=self.pos, size=self.size)
if not self.maze or not self.cell:
return
board_w = self.cell * self.cols
board_h = self.cell * self.rows
Color(0.13, 0.15, 0.18, 1)
Rectangle(pos=(self.board_x, self.board_y), size=(board_w, board_h))
if self.goal_cell:
gc, gr = self.goal_cell
Color(0.12, 0.72, 0.30, 1)
Rectangle(
pos=(self.board_x + gc * self.cell, self.board_y + (self.rows - 1 - gr) * self.cell),
size=(self.cell, self.cell),
)
Color(0.82, 0.84, 0.88, 1)
for r, row in enumerate(self.maze):
for c, value in enumerate(row):
if value == 1:
Rectangle(
pos=(self.board_x + c * self.cell, self.board_y + (self.rows - 1 - r) * self.cell),
size=(self.cell, self.cell),
)
Color(0.02, 0.03, 0.04, 1)
Line(rectangle=(self.board_x, self.board_y, board_w, board_h), width=max(1, self.cell * 0.05))
if self.ball_x is not None:
Color(0.08, 0.38, 0.95, 1)
Ellipse(
pos=(self.ball_x - self.ball_radius, self.ball_y - self.ball_radius),
size=(self.ball_radius * 2, self.ball_radius * 2),
)
Factory.register("AccelMazeBoard", cls=AccelMazeBoard)
class AccelerometerMazeController:
def __init__(self, ui, previous_orientation=None, orientation_locked=False):
self.ui = ui
self.board = ui.ids.board_widget
self.status_label = ui.ids.status_label
self.previous_orientation = previous_orientation
self.orientation_locked = orientation_locked
self.event = None
self.paused = False
self.accelerometer_enabled = False
self.calibration = None
self.last_status_update = 0
self.last_error = None
self.state = {
"ok": True,
"stage": "starting",
"message": "Starting maze game.",
"error": None,
"orientation_locked": bool(orientation_locked),
"accelerometer_enabled": False,
"paused": False,
"won": False,
}
globals()["maze_game_state"] = self.state
def start(self):
self.restart()
try:
accelerometer.enable()
self.accelerometer_enabled = True
self.state["accelerometer_enabled"] = True
self._set_status("Ready. Hold the phone normally, then tilt to move.")
except Exception as exc:
Logger.exception("PythonHere: Could not enable accelerometer")
self.last_error = f"{type(exc).__name__}: {exc}"
self.state.update(
ok=False,
stage="enable_accelerometer",
error=self.last_error,
message="Accelerometer could not be enabled.",
)
self._set_status("Accelerometer error: " + self.last_error)
self.event = Clock.schedule_interval(self._tick, 1 / 60.0)
self.state["stage"] = "running"
def cleanup(self, restore_orientation=False):
if self.event is not None:
self.event.cancel()
self.event = None
try:
if self.accelerometer_enabled:
accelerometer.disable()
except Exception:
Logger.exception("PythonHere: Could not disable accelerometer")
self.accelerometer_enabled = False
self.state["accelerometer_enabled"] = False
if restore_orientation and self.previous_orientation is not None:
try:
from jnius import autoclass
PythonActivity = autoclass("org.kivy.android.PythonActivity")
activity = PythonActivity.mActivity
if activity is not None:
activity.setRequestedOrientation(int(self.previous_orientation))
self.state["orientation_locked"] = False
except Exception:
Logger.exception("PythonHere: Could not restore previous orientation")
def restart(self, *args):
maze, start, goal = _make_accel_maze()
self.board.configure(maze, start, goal)
self.paused = False
self.calibration = None
self.state.update(
ok=True,
stage="running",
message="New maze started.",
error=None,
paused=False,
won=False,
rows=len(maze),
cols=len(maze[0]) if maze else 0,
)
self.ui.ids.pause_button.text = "Pause"
self._set_status("New maze. Tilt to move the blue ball to the green goal.")
def calibrate(self, *args):
raw = self._read_acceleration()
if raw is None:
self._set_status("Waiting for accelerometer data. Try again in a moment.")
self.state["message"] = "Calibration waiting for accelerometer data."
return
self.calibration = (raw[0], raw[1])
self.state["calibration"] = {"x": raw[0], "y": raw[1]}
self._set_status("Calibrated. Tilt gently to move.")
def toggle_pause(self, *args):
self.paused = not self.paused
self.state["paused"] = self.paused
self.ui.ids.pause_button.text = "Resume" if self.paused else "Pause"
self._set_status("Paused." if self.paused else "Running. Tilt to move.")
def _set_status(self, message):
self.status_label.text = str(message)
self.state["message"] = str(message)
def _read_acceleration(self):
raw = accelerometer.acceleration
if not raw or len(raw) < 2:
return None
if raw[0] is None or raw[1] is None:
return None
return float(raw[0]), float(raw[1])
def _tick(self, dt):
try:
if self.paused:
return
raw = self._read_acceleration()
if raw is None:
if Clock.get_time() - self.last_status_update > 1.5:
self.last_status_update = Clock.get_time()
self._set_status("Waiting for accelerometer data.")
return
if self.calibration is None:
self.calibration = (raw[0], raw[1])
self.state["calibration"] = {"x": raw[0], "y": raw[1]}
accel_x = raw[0] - self.calibration[0]
accel_y = raw[1] - self.calibration[1]
self.state["last_acceleration"] = {"x": raw[0], "y": raw[1]}
self.board.step(dt, accel_x, accel_y)
if self.board.won and not self.state.get("won"):
self.state["won"] = True
self.state["stage"] = "won"
self._set_status("You reached the goal. Press Restart for a new maze.")
except Exception as exc:
Logger.exception("PythonHere: Maze game loop failed")
self.last_error = f"{type(exc).__name__}: {exc}"
self.state.update(
ok=False,
stage="game_loop",
error=self.last_error,
message="Maze game loop error.",
)
self._set_status("Game error: " + self.last_error)
self.paused = True
self.state["paused"] = True
def _install_accelerometer_maze_game():
try:
old_cleanup = globals().get("maze_game_cleanup")
if callable(old_cleanup):
try:
old_cleanup(restore_orientation=False)
except Exception:
Logger.exception("PythonHere: Previous maze cleanup failed")
except Exception:
Logger.exception("PythonHere: Could not inspect previous maze cleanup")
previous_orientation = None
orientation_locked = False
try:
from jnius import autoclass
PythonActivity = autoclass("org.kivy.android.PythonActivity")
ActivityInfo = autoclass("android.content.pm.ActivityInfo")
activity = PythonActivity.mActivity
if activity is not None:
try:
previous_orientation = int(activity.getRequestedOrientation())
except Exception:
previous_orientation = None
activity.setRequestedOrientation(ActivityInfo.SCREEN_ORIENTATION_PORTRAIT)
orientation_locked = True
except Exception as exc:
Logger.exception("PythonHere: Could not lock screen orientation")
globals()["maze_game_orientation_error"] = f"{type(exc).__name__}: {exc}"
KV = """
#:import dp kivy.metrics.dp
#:import sp kivy.metrics.sp
BoxLayout:
orientation: "vertical"
padding: dp(10)
spacing: dp(8)
Label:
id: title_label
text: "Accel Maze"
size_hint_y: None
height: dp(40)
font_size: sp(24)
bold: True
halign: "center"
valign: "middle"
text_size: self.size
Label:
id: instruction_label
text: "Tilt the phone to move the blue ball to the green goal."
size_hint_y: None
height: dp(48)
font_size: sp(15)
halign: "center"
valign: "middle"
text_size: self.size
AccelMazeBoard:
id: board_widget
size_hint_y: 1
GridLayout:
cols: 3
spacing: dp(8)
size_hint_y: None
height: dp(56)
Button:
id: calibrate_button
text: "Calibrate"
font_size: sp(16)
Button:
id: restart_button
text: "Restart"
font_size: sp(16)
Button:
id: pause_button
text: "Pause"
font_size: sp(16)
Label:
id: status_label
text: "Starting."
size_hint_y: None
height: dp(54)
font_size: sp(14)
halign: "center"
valign: "middle"
text_size: self.size
"""
try:
ui = Builder.load_string(KV)
if ui is None:
raise RuntimeError("Builder.load_string returned None")
root.clear_widgets()
root.add_widget(ui)
controller = AccelerometerMazeController(
ui,
previous_orientation=previous_orientation,
orientation_locked=orientation_locked,
)
ui.ids.calibrate_button.bind(on_release=controller.calibrate)
ui.ids.restart_button.bind(on_release=controller.restart)
ui.ids.pause_button.bind(on_release=controller.toggle_pause)
globals()["maze_game_ui"] = ui
globals()["maze_game_controller"] = controller
def maze_game_cleanup(restore_orientation=False):
controller.cleanup(restore_orientation=restore_orientation)
globals()["maze_game_cleanup"] = maze_game_cleanup
controller.start()
if orientation_locked:
controller.state["orientation_message"] = "Portrait orientation locked."
else:
controller.state["orientation_message"] = "Portrait lock was not confirmed."
except Exception as exc:
Logger.exception("PythonHere: Could not load accelerometer maze game")
globals()["maze_game_state"] = {
"ok": False,
"stage": "install",
"error": f"{type(exc).__name__}: {exc}",
"message": "Could not load accelerometer maze game.",
}
_maze_show_error("Maze error", f"{type(exc).__name__}: {exc}")
_install_accelerometer_maze_game()
The first generated game works, but the next prompt asks for a visual direction
and a performance improvement. --fix uses the previous %%there cell as
context and inserts a replacement cell.
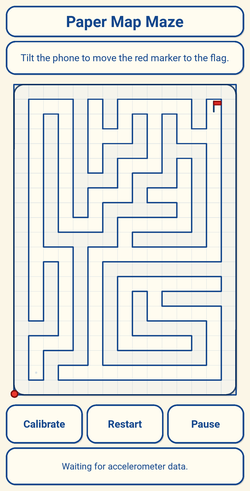
%%there ai --fix
Apply style: bright paper map
- off-white paper background
- thin blueprint-style maze lines
- small colored player marker
- dotted trail like a route map
- goal marked with a flag
- subtle grid texture
UI controls should match the paper map style: buttons and HUD as paper cards
with light fills, thin blueprint-blue outlines, rounded corners and subtle shadows.
Keep gameplay smooth: don't redraw the full board every frame; cache the static map and only update the moving marker/trail.
%there -d 1 screenshot -w 250
Show code cell source
%%there
# Generated locally by %%there ai. Review before running.
# AI mode: fix
# Fix: restyle the maze as a bright paper map and cache the static board so only the marker and route trail update each frame.
from math import floor
from random import shuffle
from kivy.clock import Clock
from kivy.factory import Factory
from kivy.graphics import Color, Ellipse, Line, Rectangle, RoundedRectangle
from kivy.graphics.instructions import InstructionGroup
from kivy.lang import Builder
from kivy.logger import Logger
from kivy.metrics import dp
from kivy.uix.button import Button
from kivy.uix.label import Label
from kivy.uix.popup import Popup
from kivy.uix.widget import Widget
from plyer import accelerometer
PAPER_BG = (0.985, 0.965, 0.905, 1)
PAPER_CARD = (1.0, 0.988, 0.94, 1)
PAPER_CARD_DOWN = (0.955, 0.975, 0.985, 1)
BLUEPRINT = (0.075, 0.275, 0.55, 1)
BLUEPRINT_LIGHT = (0.42, 0.62, 0.78, 1)
TRAIL_BLUE = (0.08, 0.36, 0.70, 1)
PLAYER_RED = (0.92, 0.22, 0.18, 1)
FLAG_RED = (0.84, 0.16, 0.14, 1)
def _maze_show_error(title, message):
globals()["maze_game_last_error"] = str(message)
try:
Popup(
title=title,
content=Label(
text=str(message)[:900],
text_size=(dp(280), None),
halign="center",
valign="middle",
),
size_hint=(0.88, 0.45),
).open()
except Exception:
Logger.exception("PythonHere: Could not show maze error popup")
class PaperCanvasMixin:
paper_radius = dp(14)
def _setup_paper_canvas(self, fill=PAPER_CARD, outline=BLUEPRINT, shadow_alpha=0.14):
self._paper_fill_rgba = fill
self._paper_outline_rgba = outline
self._paper_shadow_alpha = shadow_alpha
with self.canvas.before:
self._paper_shadow_color = Color(0.06, 0.12, 0.18, shadow_alpha)
self._paper_shadow = RoundedRectangle(
pos=(self.x + dp(2), self.y - dp(2)),
size=self.size,
radius=[self.paper_radius],
)
self._paper_fill_color = Color(*fill)
self._paper_fill_rect = RoundedRectangle(
pos=self.pos,
size=self.size,
radius=[self.paper_radius],
)
with self.canvas.after:
self._paper_outline_color = Color(*outline)
self._paper_outline = Line(
rounded_rectangle=(self.x, self.y, self.width, self.height, self.paper_radius),
width=dp(1.2),
)
self.bind(pos=self._update_paper_canvas, size=self._update_paper_canvas)
def _update_paper_canvas(self, *args):
self._paper_shadow.pos = (self.x + dp(2), self.y - dp(2))
self._paper_shadow.size = self.size
self._paper_fill_rect.pos = self.pos
self._paper_fill_rect.size = self.size
self._paper_outline.rounded_rectangle = (
self.x,
self.y,
self.width,
self.height,
self.paper_radius,
)
class PaperButton(PaperCanvasMixin, Button):
def __init__(self, **kwargs):
super().__init__(**kwargs)
self.background_normal = ""
self.background_down = ""
self.background_color = (0, 0, 0, 0)
self.color = BLUEPRINT
self.bold = True
self._setup_paper_canvas()
self.bind(state=self._on_paper_state)
def _on_paper_state(self, *args):
if self.state == "down":
self._paper_fill_color.rgba = PAPER_CARD_DOWN
self._paper_shadow_color.rgba = (0.06, 0.12, 0.18, 0.06)
self._paper_shadow.pos = (self.x + dp(1), self.y - dp(1))
else:
self._paper_fill_color.rgba = PAPER_CARD
self._paper_shadow_color.rgba = (0.06, 0.12, 0.18, self._paper_shadow_alpha)
self._paper_shadow.pos = (self.x + dp(2), self.y - dp(2))
class PaperCardLabel(PaperCanvasMixin, Label):
def __init__(self, **kwargs):
super().__init__(**kwargs)
self.color = BLUEPRINT
self.padding = (dp(10), dp(6))
self._setup_paper_canvas()
def _make_accel_maze(cols=15, rows=21):
if cols % 2 == 0:
cols += 1
if rows % 2 == 0:
rows += 1
maze = [[1 for _ in range(cols)] for _ in range(rows)]
start = (1, rows - 2)
goal = (cols - 2, 1)
stack = [start]
maze[start[1]][start[0]] = 0
while stack:
c, r = stack[-1]
choices = []
for dc, dr in ((2, 0), (-2, 0), (0, 2), (0, -2)):
nc, nr = c + dc, r + dr
if 1 <= nc < cols - 1 and 1 <= nr < rows - 1 and maze[nr][nc] == 1:
choices.append((nc, nr, dc, dr))
if choices:
shuffle(choices)
nc, nr, dc, dr = choices[0]
maze[r + dr // 2][c + dc // 2] = 0
maze[nr][nc] = 0
stack.append((nc, nr))
else:
stack.pop()
maze[start[1]][start[0]] = 0
maze[goal[1]][goal[0]] = 0
return maze, start, goal
class AccelMazeBoard(Widget):
def __init__(self, **kwargs):
super().__init__(**kwargs)
self.maze = []
self.cols = 0
self.rows = 0
self.start_cell = None
self.goal_cell = None
self.cell = 0
self.board_x = 0
self.board_y = 0
self.ball_x = None
self.ball_y = None
self.ball_radius = 8
self.velocity_x = 0
self.velocity_y = 0
self.won = False
self.static_group = InstructionGroup()
self.trail_group = InstructionGroup()
self.marker_group = InstructionGroup()
self.canvas.add(self.static_group)
self.canvas.add(self.trail_group)
self.canvas.add(self.marker_group)
self.max_trail_dots = 80
self.trail_points = []
self.trail_refs = []
self._last_trail_point = None
self._build_dynamic_instruction_cache()
self.bind(pos=self._on_layout_change, size=self._on_layout_change)
def _build_dynamic_instruction_cache(self):
for _index in range(self.max_trail_dots):
dot_color = Color(TRAIL_BLUE[0], TRAIL_BLUE[1], TRAIL_BLUE[2], 0)
dot = Ellipse(pos=(-100, -100), size=(0, 0))
self.trail_group.add(dot_color)
self.trail_group.add(dot)
self.trail_refs.append((dot_color, dot))
self.marker_shadow_color = Color(0.08, 0.10, 0.12, 0)
self.marker_shadow = Ellipse(pos=(-100, -100), size=(0, 0))
self.marker_fill_color = Color(*PLAYER_RED)
self.marker_fill = Ellipse(pos=(-100, -100), size=(0, 0))
self.marker_outline_color = Color(0.48, 0.04, 0.03, 0)
self.marker_outline = Line(circle=(-100, -100, 1), width=dp(1.2))
self.marker_group.add(self.marker_shadow_color)
self.marker_group.add(self.marker_shadow)
self.marker_group.add(self.marker_fill_color)
self.marker_group.add(self.marker_fill)
self.marker_group.add(self.marker_outline_color)
self.marker_group.add(self.marker_outline)
def configure(self, maze, start_cell, goal_cell):
self.maze = maze
self.rows = len(maze)
self.cols = len(maze[0]) if self.rows else 0
self.start_cell = start_cell
self.goal_cell = goal_cell
self.won = False
self.velocity_x = 0
self.velocity_y = 0
self.ball_x = None
self.ball_y = None
self.trail_points = []
self._last_trail_point = None
self._update_metrics()
self._ensure_ball_position()
self._record_trail_point(force=True)
self._redraw_static_map()
self._update_trail_instructions()
self._update_marker_instruction()
def reset_ball(self):
self.velocity_x = 0
self.velocity_y = 0
self.won = False
self.ball_x = None
self.ball_y = None
self.trail_points = []
self._last_trail_point = None
self._ensure_ball_position()
self._record_trail_point(force=True)
self._update_trail_instructions()
self._update_marker_instruction()
def _on_layout_change(self, *args):
old_cell = self.cell
old_rel_x = None
old_rel_y = None
if self.ball_x is not None and old_cell:
old_rel_x = (self.ball_x - self.board_x) / old_cell
old_rel_y = (self.ball_y - self.board_y) / old_cell
self._update_metrics()
if old_rel_x is not None and self.cell:
self.ball_x = self.board_x + old_rel_x * self.cell
self.ball_y = self.board_y + old_rel_y * self.cell
self.ball_radius = max(dp(4), self.cell * 0.22)
else:
self._ensure_ball_position()
self._redraw_static_map()
self._update_trail_instructions()
self._update_marker_instruction()
def _update_metrics(self):
if not self.cols or not self.rows or self.width <= 0 or self.height <= 0:
self.cell = 0
return
padding = dp(8)
available_w = max(1, self.width - padding * 2)
available_h = max(1, self.height - padding * 2)
self.cell = min(available_w / self.cols, available_h / self.rows)
self.board_x = self.x + (self.width - self.cell * self.cols) / 2
self.board_y = self.y + (self.height - self.cell * self.rows) / 2
self.ball_radius = max(dp(4), self.cell * 0.22)
def _cell_center(self, cell):
c, r = cell
return (
self.board_x + (c + 0.5) * self.cell,
self.board_y + (self.rows - r - 0.5) * self.cell,
)
def _cell_at_point(self, x, y):
if not self.cell:
return None
c = int(floor((x - self.board_x) / self.cell))
bottom_row = int(floor((y - self.board_y) / self.cell))
r = self.rows - 1 - bottom_row
if 0 <= c < self.cols and 0 <= r < self.rows:
return c, r
return None
def _ensure_ball_position(self):
if self.ball_x is None and self.start_cell and self.cell:
self.ball_x, self.ball_y = self._cell_center(self.start_cell)
self.ball_radius = max(dp(4), self.cell * 0.22)
def _circle_hits_wall(self, x, y):
if not self.cell or not self.maze:
return True
radius = self.ball_radius
c0 = int(floor((x - radius - self.board_x) / self.cell))
c1 = int(floor((x + radius - self.board_x) / self.cell))
b0 = int(floor((y - radius - self.board_y) / self.cell))
b1 = int(floor((y + radius - self.board_y) / self.cell))
for c in range(c0, c1 + 1):
for bottom_row in range(b0, b1 + 1):
r = self.rows - 1 - bottom_row
if c < 0 or c >= self.cols or r < 0 or r >= self.rows:
return True
if self.maze[r][c] == 1:
left = self.board_x + c * self.cell
bottom = self.board_y + bottom_row * self.cell
right = left + self.cell
top = bottom + self.cell
closest_x = min(max(x, left), right)
closest_y = min(max(y, bottom), top)
dx = x - closest_x
dy = y - closest_y
if dx * dx + dy * dy < radius * radius:
return True
return False
def _record_trail_point(self, force=False):
if self.ball_x is None or not self.cell:
return
rel = (
(self.ball_x - self.board_x) / self.cell,
(self.ball_y - self.board_y) / self.cell,
)
if self._last_trail_point is not None and not force:
dx = rel[0] - self._last_trail_point[0]
dy = rel[1] - self._last_trail_point[1]
if dx * dx + dy * dy < 0.16:
return
self.trail_points.append(rel)
self.trail_points = self.trail_points[-self.max_trail_dots:]
self._last_trail_point = rel
self._update_trail_instructions()
def step(self, dt, accel_x, accel_y):
if self.won:
return
self._update_metrics()
self._ensure_ball_position()
if self.ball_x is None or not self.cell:
return
dt = min(max(dt, 0.0), 0.05)
dead_zone = 0.04
if abs(accel_x) < dead_zone:
accel_x = 0
if abs(accel_y) < dead_zone:
accel_y = 0
force = self.cell * 36.0
self.velocity_x += accel_x * force * dt
self.velocity_y += accel_y * force * dt
friction = max(0.0, 1.0 - 2.1 * dt)
self.velocity_x *= friction
self.velocity_y *= friction
max_speed = self.cell * 7.5
speed_sq = self.velocity_x * self.velocity_x + self.velocity_y * self.velocity_y
if speed_sq > max_speed * max_speed:
scale = max_speed / (speed_sq ** 0.5)
self.velocity_x *= scale
self.velocity_y *= scale
next_x = self.ball_x + self.velocity_x * dt
if not self._circle_hits_wall(next_x, self.ball_y):
self.ball_x = next_x
else:
self.velocity_x *= -0.25
next_y = self.ball_y + self.velocity_y * dt
if not self._circle_hits_wall(self.ball_x, next_y):
self.ball_y = next_y
else:
self.velocity_y *= -0.25
self._record_trail_point()
current_cell = self._cell_at_point(self.ball_x, self.ball_y)
if current_cell == self.goal_cell:
self.won = True
self.velocity_x = 0
self.velocity_y = 0
self._update_marker_instruction()
def _add_static_line(self, points, width=None, color=BLUEPRINT):
self.static_group.add(Color(color[0], color[1], color[2], color[3]))
self.static_group.add(Line(points=points, width=width or max(dp(0.8), self.cell * 0.035)))
def _redraw_static_map(self):
self.static_group.clear()
self.static_group.add(Color(*PAPER_BG))
self.static_group.add(Rectangle(pos=self.pos, size=self.size))
if not self.maze or not self.cell:
return
board_w = self.cell * self.cols
board_h = self.cell * self.rows
shadow_offset = dp(3)
self.static_group.add(Color(0.08, 0.12, 0.16, 0.10))
self.static_group.add(
RoundedRectangle(
pos=(self.board_x + shadow_offset, self.board_y - shadow_offset),
size=(board_w, board_h),
radius=[dp(16)],
)
)
self.static_group.add(Color(1.0, 0.988, 0.94, 1))
self.static_group.add(
RoundedRectangle(
pos=(self.board_x, self.board_y),
size=(board_w, board_h),
radius=[dp(16)],
)
)
grid_width = max(dp(0.45), self.cell * 0.012)
self.static_group.add(Color(0.38, 0.56, 0.72, 0.18))
for c in range(self.cols + 1):
x = self.board_x + c * self.cell
self.static_group.add(Line(points=[x, self.board_y, x, self.board_y + board_h], width=grid_width))
for r in range(self.rows + 1):
y = self.board_y + r * self.cell
self.static_group.add(Line(points=[self.board_x, y, self.board_x + board_w, y], width=grid_width))
self.static_group.add(Color(0.12, 0.32, 0.58, 0.045))
for r, row in enumerate(self.maze):
for c, value in enumerate(row):
if value == 1:
self.static_group.add(
Rectangle(
pos=(self.board_x + c * self.cell, self.board_y + (self.rows - 1 - r) * self.cell),
size=(self.cell, self.cell),
)
)
line_width = max(dp(1.0), self.cell * 0.045)
self.static_group.add(Color(*BLUEPRINT))
for r, row in enumerate(self.maze):
for c, value in enumerate(row):
if value != 1:
continue
left = self.board_x + c * self.cell
bottom = self.board_y + (self.rows - 1 - r) * self.cell
right = left + self.cell
top = bottom + self.cell
if r == 0 or self.maze[r - 1][c] == 0:
self.static_group.add(Line(points=[left, top, right, top], width=line_width))
if r == self.rows - 1 or self.maze[r + 1][c] == 0:
self.static_group.add(Line(points=[left, bottom, right, bottom], width=line_width))
if c == 0 or self.maze[r][c - 1] == 0:
self.static_group.add(Line(points=[left, bottom, left, top], width=line_width))
if c == self.cols - 1 or self.maze[r][c + 1] == 0:
self.static_group.add(Line(points=[right, bottom, right, top], width=line_width))
self.static_group.add(Color(0.02, 0.16, 0.34, 0.82))
self.static_group.add(
Line(
rounded_rectangle=(self.board_x, self.board_y, board_w, board_h, dp(16)),
width=max(dp(1.1), self.cell * 0.035),
)
)
if self.goal_cell:
cx, cy = self._cell_center(self.goal_cell)
pole_bottom = cy - self.cell * 0.34
pole_top = cy + self.cell * 0.36
flag_w = self.cell * 0.48
flag_h = self.cell * 0.24
self.static_group.add(Color(0.08, 0.24, 0.43, 1))
self.static_group.add(Line(points=[cx, pole_bottom, cx, pole_top], width=max(dp(1.2), self.cell * 0.045)))
self.static_group.add(Color(*FLAG_RED))
self.static_group.add(
Rectangle(
pos=(cx, pole_top - flag_h),
size=(flag_w, flag_h),
)
)
self.static_group.add(Color(0.55, 0.05, 0.04, 1))
self.static_group.add(
Line(
rectangle=(cx, pole_top - flag_h, flag_w, flag_h),
width=max(dp(0.8), self.cell * 0.025),
)
)
def _update_trail_instructions(self):
visible = self.trail_points[-self.max_trail_dots:]
dot_radius = max(dp(1.7), self.cell * 0.075) if self.cell else dp(2)
for index, (dot_color, dot) in enumerate(self.trail_refs):
if index < len(visible) and self.cell:
rel_x, rel_y = visible[index]
px = self.board_x + rel_x * self.cell
py = self.board_y + rel_y * self.cell
age = index / max(1, len(visible) - 1)
alpha = 0.16 + 0.58 * age
dot_color.rgba = (TRAIL_BLUE[0], TRAIL_BLUE[1], TRAIL_BLUE[2], alpha)
dot.pos = (px - dot_radius, py - dot_radius)
dot.size = (dot_radius * 2, dot_radius * 2)
else:
dot_color.rgba = (TRAIL_BLUE[0], TRAIL_BLUE[1], TRAIL_BLUE[2], 0)
dot.pos = (-100, -100)
dot.size = (0, 0)
def _update_marker_instruction(self):
if self.ball_x is None or not self.cell:
self.marker_shadow_color.rgba = (0.08, 0.10, 0.12, 0)
self.marker_fill_color.rgba = (PLAYER_RED[0], PLAYER_RED[1], PLAYER_RED[2], 0)
self.marker_outline_color.rgba = (0.48, 0.04, 0.03, 0)
return
radius = self.ball_radius
self.marker_shadow_color.rgba = (0.08, 0.10, 0.12, 0.18)
self.marker_shadow.pos = (
self.ball_x - radius + dp(1.3),
self.ball_y - radius - dp(1.3),
)
self.marker_shadow.size = (radius * 2, radius * 2)
self.marker_fill_color.rgba = PLAYER_RED
self.marker_fill.pos = (self.ball_x - radius, self.ball_y - radius)
self.marker_fill.size = (radius * 2, radius * 2)
self.marker_outline_color.rgba = (0.48, 0.04, 0.03, 1)
self.marker_outline.circle = (self.ball_x, self.ball_y, radius)
self.marker_outline.width = max(dp(1.0), self.cell * 0.035)
Factory.register("PaperButton", cls=PaperButton)
Factory.register("PaperCardLabel", cls=PaperCardLabel)
Factory.register("AccelMazeBoard", cls=AccelMazeBoard)
class AccelerometerMazeController:
def __init__(self, ui, previous_orientation=None, orientation_locked=False):
self.ui = ui
self.board = ui.ids.board_widget
self.status_label = ui.ids.status_label
self.previous_orientation = previous_orientation
self.orientation_locked = orientation_locked
self.event = None
self.paused = False
self.accelerometer_enabled = False
self.calibration = None
self.last_status_update = 0
self.last_error = None
self.state = {
"ok": True,
"stage": "starting",
"message": "Starting paper map maze.",
"error": None,
"orientation_locked": bool(orientation_locked),
"accelerometer_enabled": False,
"paused": False,
"won": False,
"style": "bright paper map",
"static_map_cached": True,
}
globals()["maze_game_state"] = self.state
def start(self):
self.restart()
try:
accelerometer.enable()
self.accelerometer_enabled = True
self.state["accelerometer_enabled"] = True
self._set_status("Ready. Hold the phone normally, then tilt to move.")
except Exception as exc:
Logger.exception("PythonHere: Could not enable accelerometer")
self.last_error = f"{type(exc).__name__}: {exc}"
self.state.update(
ok=False,
stage="enable_accelerometer",
error=self.last_error,
message="Accelerometer could not be enabled.",
)
self._set_status("Accelerometer error: " + self.last_error)
self.event = Clock.schedule_interval(self._tick, 1 / 60.0)
self.state["stage"] = "running"
def cleanup(self, restore_orientation=False):
if self.event is not None:
self.event.cancel()
self.event = None
try:
if self.accelerometer_enabled:
accelerometer.disable()
except Exception:
Logger.exception("PythonHere: Could not disable accelerometer")
self.accelerometer_enabled = False
self.state["accelerometer_enabled"] = False
if restore_orientation and self.previous_orientation is not None:
try:
from jnius import autoclass
PythonActivity = autoclass("org.kivy.android.PythonActivity")
activity = PythonActivity.mActivity
if activity is not None:
activity.setRequestedOrientation(int(self.previous_orientation))
self.state["orientation_locked"] = False
except Exception:
Logger.exception("PythonHere: Could not restore previous orientation")
def restart(self, *args):
maze, start, goal = _make_accel_maze()
self.board.configure(maze, start, goal)
self.paused = False
self.calibration = None
self.state.update(
ok=True,
stage="running",
message="New paper map maze started.",
error=None,
paused=False,
won=False,
rows=len(maze),
cols=len(maze[0]) if maze else 0,
trail_dots=0,
)
self.ui.ids.pause_button.text = "Pause"
self._set_status("New map. Tilt to move the red marker to the flag.")
def calibrate(self, *args):
raw = self._read_acceleration()
if raw is None:
self._set_status("Waiting for accelerometer data. Try again in a moment.")
self.state["message"] = "Calibration waiting for accelerometer data."
return
self.calibration = (raw[0], raw[1])
self.state["calibration"] = {"x": raw[0], "y": raw[1]}
self._set_status("Calibrated. Tilt gently to follow the route.")
def toggle_pause(self, *args):
self.paused = not self.paused
self.state["paused"] = self.paused
self.ui.ids.pause_button.text = "Resume" if self.paused else "Pause"
self._set_status("Paused." if self.paused else "Running. Tilt to move.")
def _set_status(self, message):
self.status_label.text = str(message)
self.state["message"] = str(message)
def _read_acceleration(self):
raw = accelerometer.acceleration
if not raw or len(raw) < 2:
return None
if raw[0] is None or raw[1] is None:
return None
return float(raw[0]), float(raw[1])
def _tick(self, dt):
try:
if self.paused:
return
raw = self._read_acceleration()
if raw is None:
if Clock.get_time() - self.last_status_update > 1.5:
self.last_status_update = Clock.get_time()
self._set_status("Waiting for accelerometer data.")
return
if self.calibration is None:
self.calibration = (raw[0], raw[1])
self.state["calibration"] = {"x": raw[0], "y": raw[1]}
accel_x = raw[0] - self.calibration[0]
accel_y = raw[1] - self.calibration[1]
self.state["last_acceleration"] = {"x": raw[0], "y": raw[1]}
self.board.step(dt, accel_x, accel_y)
self.state["trail_dots"] = len(self.board.trail_points)
if self.board.won and not self.state.get("won"):
self.state["won"] = True
self.state["stage"] = "won"
self._set_status("You reached the flag. Press Restart for a new map.")
except Exception as exc:
Logger.exception("PythonHere: Maze game loop failed")
self.last_error = f"{type(exc).__name__}: {exc}"
self.state.update(
ok=False,
stage="game_loop",
error=self.last_error,
message="Maze game loop error.",
)
self._set_status("Game error: " + self.last_error)
self.paused = True
self.state["paused"] = True
def _install_accelerometer_maze_game():
try:
old_cleanup = globals().get("maze_game_cleanup")
if callable(old_cleanup):
try:
old_cleanup(restore_orientation=False)
except Exception:
Logger.exception("PythonHere: Previous maze cleanup failed")
except Exception:
Logger.exception("PythonHere: Could not inspect previous maze cleanup")
previous_orientation = None
orientation_locked = False
try:
from jnius import autoclass
PythonActivity = autoclass("org.kivy.android.PythonActivity")
ActivityInfo = autoclass("android.content.pm.ActivityInfo")
activity = PythonActivity.mActivity
if activity is not None:
try:
previous_orientation = int(activity.getRequestedOrientation())
except Exception:
previous_orientation = None
activity.setRequestedOrientation(ActivityInfo.SCREEN_ORIENTATION_PORTRAIT)
orientation_locked = True
except Exception as exc:
Logger.exception("PythonHere: Could not lock screen orientation")
globals()["maze_game_orientation_error"] = f"{type(exc).__name__}: {exc}"
KV = """
#:import dp kivy.metrics.dp
#:import sp kivy.metrics.sp
BoxLayout:
orientation: "vertical"
padding: dp(10)
spacing: dp(8)
canvas.before:
Color:
rgba: 0.985, 0.965, 0.905, 1
Rectangle:
pos: self.pos
size: self.size
PaperCardLabel:
id: title_label
text: "Paper Map Maze"
size_hint_y: None
height: dp(46)
font_size: sp(24)
bold: True
halign: "center"
valign: "middle"
text_size: self.size
PaperCardLabel:
id: instruction_label
text: "Tilt the phone to move the red marker to the flag."
size_hint_y: None
height: dp(50)
font_size: sp(15)
halign: "center"
valign: "middle"
text_size: self.size
AccelMazeBoard:
id: board_widget
size_hint_y: 1
GridLayout:
cols: 3
spacing: dp(8)
size_hint_y: None
height: dp(58)
PaperButton:
id: calibrate_button
text: "Calibrate"
font_size: sp(16)
PaperButton:
id: restart_button
text: "Restart"
font_size: sp(16)
PaperButton:
id: pause_button
text: "Pause"
font_size: sp(16)
PaperCardLabel:
id: status_label
text: "Starting."
size_hint_y: None
height: dp(56)
font_size: sp(14)
halign: "center"
valign: "middle"
text_size: self.size
"""
try:
ui = Builder.load_string(KV)
if ui is None:
raise RuntimeError("Builder.load_string returned None")
root.clear_widgets()
root.add_widget(ui)
controller = AccelerometerMazeController(
ui,
previous_orientation=previous_orientation,
orientation_locked=orientation_locked,
)
ui.ids.calibrate_button.bind(on_release=controller.calibrate)
ui.ids.restart_button.bind(on_release=controller.restart)
ui.ids.pause_button.bind(on_release=controller.toggle_pause)
globals()["maze_game_ui"] = ui
globals()["maze_game_controller"] = controller
def maze_game_cleanup(restore_orientation=False):
controller.cleanup(restore_orientation=restore_orientation)
globals()["maze_game_cleanup"] = maze_game_cleanup
controller.start()
if orientation_locked:
controller.state["orientation_message"] = "Portrait orientation locked."
else:
controller.state["orientation_message"] = "Portrait lock was not confirmed."
except Exception as exc:
Logger.exception("PythonHere: Could not load accelerometer maze game")
globals()["maze_game_state"] = {
"ok": False,
"stage": "install",
"error": f"{type(exc).__name__}: {exc}",
"message": "Could not load accelerometer maze game.",
}
_maze_show_error("Maze error", f"{type(exc).__name__}: {exc}")
_install_accelerometer_maze_game()
%there -d 1 screenshot -w 250